小贴士合集【十月】
2023/10/1 PWM呼吸灯
如果led灯在10毫秒内,5毫秒打开,5毫秒关闭,(频率100Hz) 这时候灯光的亮灭速度赶不上开关速度(LED灯还没完全亮就又熄灭了),
由于视觉暂留作用 人眼不感觉电灯在闪烁,而是感觉灯的亮度少了 因为高电平时间(占空比)为50% 亮度也就为之前的50%
占空比越大,LED越亮。频率在50hz以上时,看不到闪烁;频率在50hz以下时,可看到闪烁。
所以,在频率一定下,可以用不同占空比(即pwm)改变LED灯的亮度。使其达到一个呼吸灯(灯亮度强弱不断变化)的效果
2023/10/2 PWM电机调速
电机的作用是通过电生磁,将电能转化为机械能,使转子转动,实现各种运动控制。
占空比可以实现对电机转速的调节。当输出端高电平时,电机会转动,逐渐提速,在速度未达到最大时,使高电平突然变为低电平,电机由于铜线圈电感,有防止电流突变的作用,电机是不会立即停止的,会暂时保持原有的转速;此时再立即变为高电平,同样因为电感作用,暂时保持原来的转速。
以此往复,电机的转速就是周期内输出的平均电压值,所以pwm调节占空比就能调节电机速度了
2023/10/2 PWM电机调速
电机的作用是通过电生磁,将电能转化为机械能,使转子转动,实现各种运动控制。
占空比可以实现对电机转速的调节。当输出端高电平时,电机会转动,逐渐提速,在速度未达到最大时,使高电平突然变为低电平,电机由于铜线圈电感,有防止电流突变的作用,电机是不会立即停止的,会暂时保持原有的转速;此时再立即变为高电平,同样因为电感作用,暂时保持原来的转速。
以此往复,电机的转速就是周期内输出的平均电压值,所以pwm调节占空比就能调节电机速度了
2023/10/3 电机控制
在电机控制中,电压越大,电机转速越快,而通过PWM输出不同的模拟电压,便可以使电机达到不同的输出转速。
在电机控制中,不同的电机都有其适应的频率,频率太低会导致运动不稳定,如果频率刚好在人耳听觉范围,有时还会听到呼啸声。频率太高,电机可能跟不上,导致电机转动情况和预期不一样。
2023/10/4 舵机
 舵机本质上是一个小电机加上减速齿轮。
舵机接收PWM控制脉冲,控制电机旋转,电机带动减速齿轮组,最后传动输出至舵盘,进而使舵机转动预定的角度并保持。
舵机本质上是一个小电机加上减速齿轮。
舵机接收PWM控制脉冲,控制电机旋转,电机带动减速齿轮组,最后传动输出至舵盘,进而使舵机转动预定的角度并保持。
180度舵机:
180度舵机指的是舵机的旋转角度范围为180度。它通常用于需要在有限角度范围内进行精确控制的应用,可用在机器手臂等上。
360度舵机:
360度舵机指的是舵机的旋转角度范围为360度。它可以实现无限旋转,可以在任意角度上停下。用在摄像头云台等上。
一个很重要的区别,
180度舵机控制转角,希望转多少度就转多少度
360度舵机控制转速,旋转角度更广,但需要计算换算后才能转过固定度数
2023/10/5 舵机PWM对舵机的控制
舵机的频率一般为频率为50HZ,也就是一个20ms左右的脉冲,而脉冲的高电平部分一般为0.5ms-2.5ms范围。通过pwm调节占空比来控制舵机不同的转角
500-2500us的PWM高电平部分对应控制180度舵机的0-180度,对应的控制关系是这样的:
- 500us————–0度;
- 1000us————45度;
- 1500us————90度;
- 2000us———–135度;
- 2500us———–180度;
得到一个数学公式:
高电平时间=2000*(角度/180)+500
变形可得:
角度=(高电平时间-500)/2000 * 180
2023/10/6 模拟信号和数字信号
信号可以分成连续信号和离散信号。
连续信号变化均匀,没有突变。
离散信号可以只有有限0,1两个值。
可以说连续变化的信号就是模拟信号,离散(不连续)的信号是数字信号。 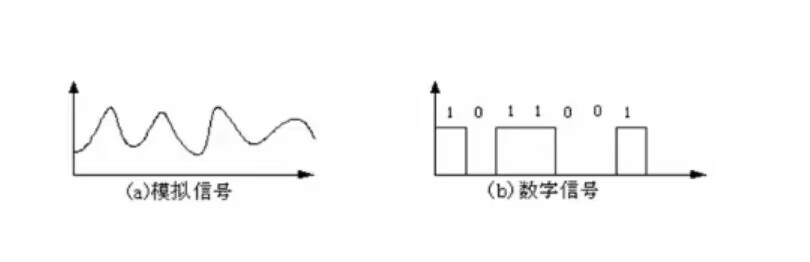
2023/10/7 模拟信号的特点
- 分辨率(即精度)很高,由于是连续信号,理论上的分辨率为无穷大,更容易模拟出生活中的现象,因为生活中大部分的信号都是连续信号。
- 模拟信号主要的缺点就在于抗噪声(泛指不需要的信号,如:收音机电流声等)能力比较弱,模拟信号不同的振幅代表完全不一样的信息,很容易被干扰。随着距离越长,噪声的影响越大。
2023/10/8 数字信号的特点
- 抗噪声能力强
数字信号和模拟信号都是信号,收到噪声影响一定会产生干扰,但是数字信号相比模拟信号是在受干扰的情况下能更好的还原成原来的信号,因为只有0和1两种电平,当信噪比(所需信号与噪声的比例)恶化到一定程度,我们仍然可能通过观察信号的电平是接近0还是1,来大致识别出两种状态 - 便于储存和交换
计算机系统是二进制,只能处理数字信号,因此便于用计算机对数字信号进行存储、处理和交换。
2023/10/20 陀螺仪(一)
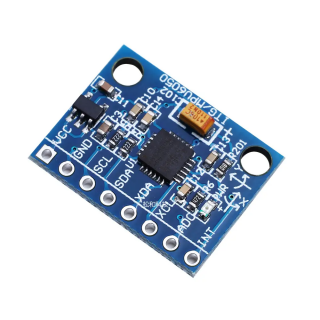 陀螺仪用于测量当前的x,y,z三轴的加速度和角加速度,根据公式可换算得知当前的角度。
陀螺仪用于测量当前的x,y,z三轴的加速度和角加速度,根据公式可换算得知当前的角度。
陀螺仪内部有3轴加速度计,可测量x,y,z轴加速度。求的是陀螺仪静止时的加速度。
可以想象陀螺仪内部有一个小球,可以自由滚动。当陀螺仪平稳时,小球只会挤压底面测力计,产生压力,由f=ma可知,此时在不考虑支持力的情况下,小球加速度就近似于g了(压力传感器有一定误差)。
当陀螺仪倾斜时,小球至少挤压2个面,产生至少2个压力,由f=ma可知,算出每个坐标轴上分别的加速度。类比力的合成算出合加速度(即重力加速度)图中a1与a合的夹角就是就是当前的偏转角度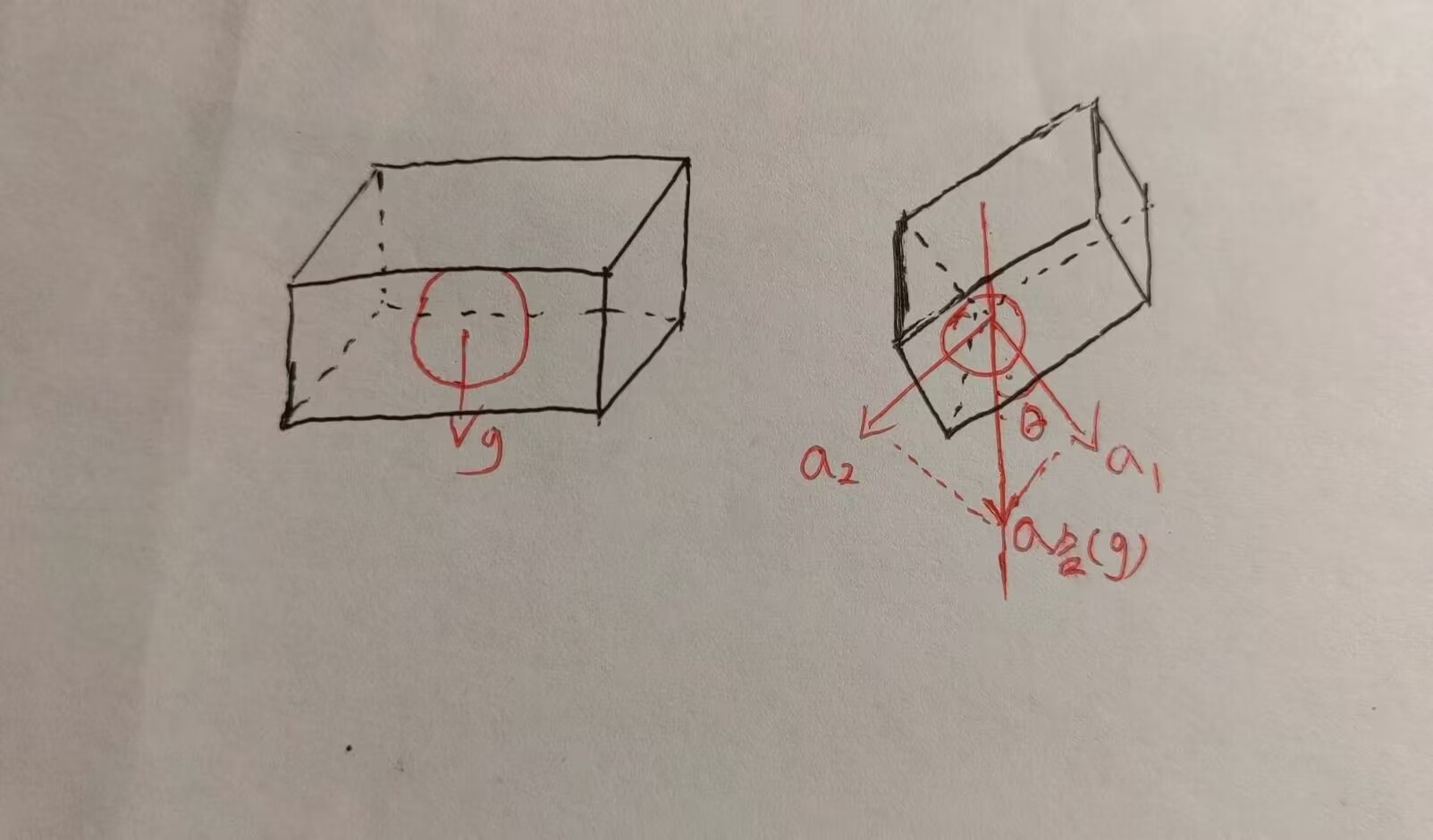
2023/10/21 陀螺仪(二)
紧接上节,加速度计求的是陀螺仪静止时的偏转角度。当物体运动起来,会产生运动加速度,这时加速度计就不准确了。
陀螺仪内部还有3轴陀螺仪传感器,可测量x,y,z轴角速度。 依据w*t=θ,即可求出偏转角度。但当物体静止时,不可避免有轻微的晃动(噪声),就会使得角速度值不为零,会产生一定幅度的角度偏差。
总结一下,测量偏转角时,加速度计在静止时稳定,运动时不稳定;
陀螺仪传感器在运动时稳定,静止时不稳定。两者结合使用,优势互补,就能得到较为稳定的偏转角度了。
2023/10/22 ADC和DAC
一般我们把模拟信号(Analog signal) 简写成A,数字信号(digital signal)简写成D。ADC全称是Analog-to-Digital Converter模数转换器,DAC全称是Digital-to-Analog Converter数模转换器
当我们在使用单片机时,往往需要获取一些外部的模拟信号,比如光照强度(利用光敏电阻,将光照强度转换成连续电压表示,此时的电压也就是模拟信号)等等。但是单片机本身只能处理数字信号,所以就需要通过ADC将模拟信号转换为数字信号。
GPIO一般只能输出高低电平(0/3.3v/5v),我们如果需要获得区间内任意大小的电压(模拟信号),我们可以利用DAC将数字信号直接转换为模拟信号
提示:也可以利用之前学过的pwm进行数模转换(想一想pwm得到的模拟信号精度高不高,具体后续解释)
2023/10/23 ADC(一)
假设模拟信号的范围是0-3.3v,对应数字信号的范围是0-4095(用二进制表示为1111 1111)。
于是对应关系的式子为:数字信号值=(模拟信号值/3.3)*4096
比如输入1V的电压,那么ADC返回的数字信号值是
1/ 3.3 x 4096 = 1241
反过来,当单片机收到ADC返回的是1241,单片机就可以知道待测电压是1V了。
2023/10/24 ADC(二)
ADC工作原理大多为逐次逼近型。
未知的模拟信号转变为电压的形式后,输入比较器中。
另一边,用已知的数字信号输入DAC中,转化输出为模拟电压,也输入到比较器中。
比较器比较两处电压的大小,根据比较结果有如图右下角的过程,逐次逼近直到电压相等,说明两种信号等效,此时输入DAC的数字信号就是ADC转化结果,放入寄存器中储存下来。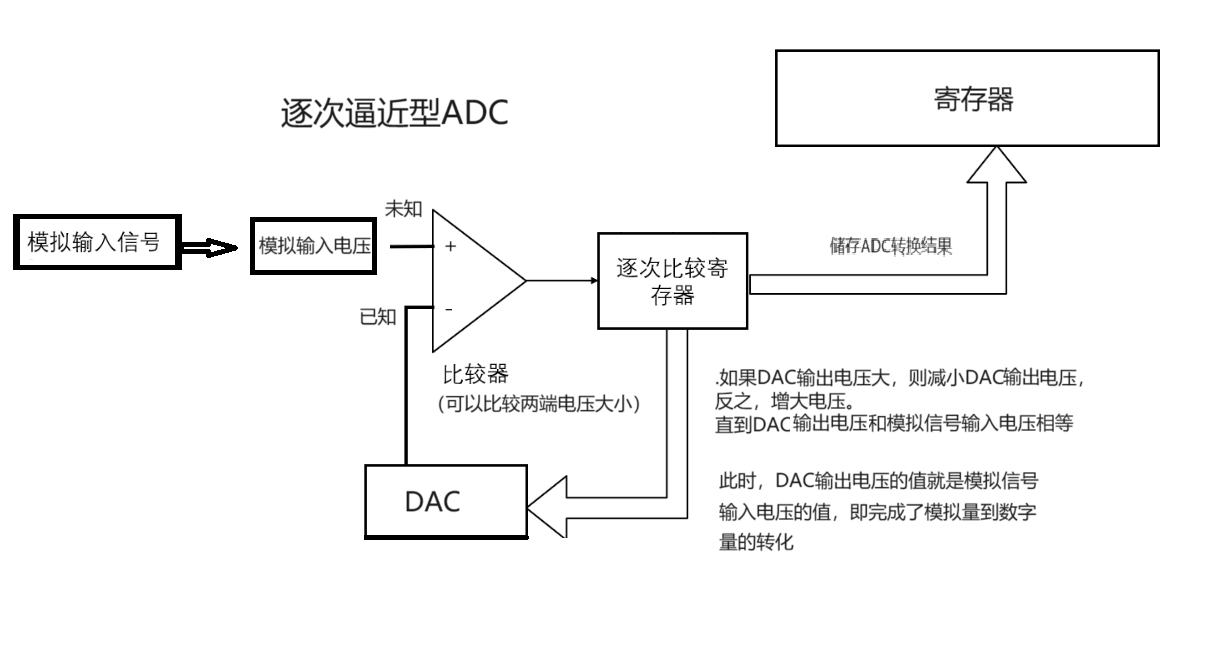
2023/10/25 ADC(三)
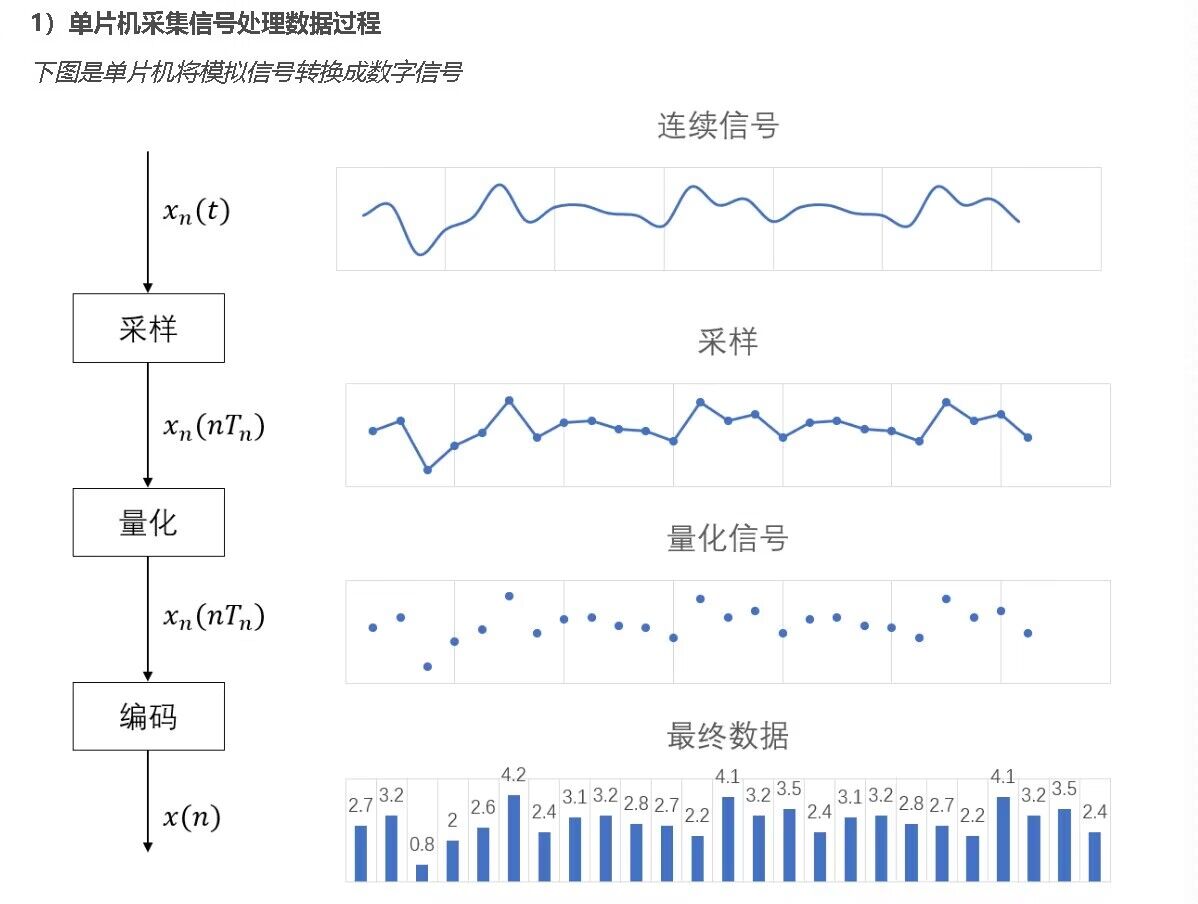
ADC全过程上节已经说过,这次分步讲解。ADC分为三个过程采样,量化,编码。
- 采样:指将波形按一定采样频率(时间间隔)进行切分
- 量化:取出采样后的散点
- 编码:将得到的数据转化为二进制(数字信号)储存。
2023/10/26 奈奎斯特采样定理
为了使量化后的散点图能展现原波形特点(称为采样不失真)
奈奎斯特采样定理说明,要达到这个效果,采样频率fs必须大于被测信号最高频率fn的两倍,即fs>2*fn。
以正弦波为例,fs为采样频率,fn为信号最高频率
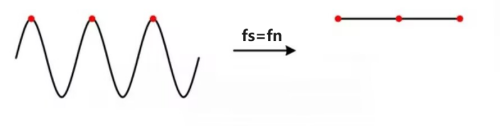
假设采样频率 fs=fn
如下图所示,因为采样频率和被测信号频率一致,正弦波信号一个周期内只能采样到1个点,并且都在相同位置,最后ADC采样完成并量化出来的信号波形就是一条直线,明显不是正确的结果。![1]()
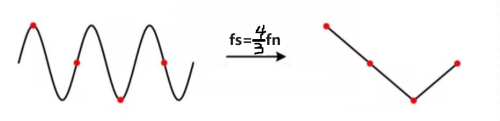
假设采样频率 fs=(4/3)* fn
我们稍微提高一点采样率,变为4/3倍,在不同周期内,有的时候可以采样到1个点,有的时候可以采样到2个点,但是最后量化出来的线条还是失真严重,因此也不满足。![1]()
假设采样频率 fs=2fn
当我们采样率达到2倍信号频率的时候,假如说运气较好,正好第一个采样点就在正弦波的波峰或者波谷,那么在被测信号的每个周期内,正好可以采样到振幅最大和最小的两个点,量化后可以得到三角波,经过适当地处理后,可以恢复成原来的正弦波。![1]()
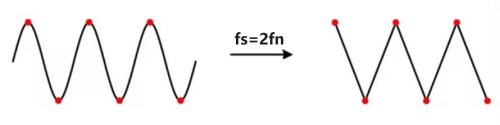
但是如果每个周期采样的两个点并不是位于波峰或者波谷的话,采样过来的信号同样会失真。因此2倍这个数字只是理论值,我们实际在使用的时候,为了不失真,一个周期内最好采样被测信号5个点以上。
2023/10/27 傅里叶变换
基波:一个周期性信号中频率最低的正弦波。振幅通常比其他谐波更高。
谐波:除了基波以外的所有频率为基波频率整数倍的正弦波。
任何非正弦波都可以视成是基波和无数不同频率,不同相位的谐波分量组成(傅里叶变换得到的结论)。
非正弦波由最小值过渡到最大值的时间越短,所含的谐波分量也就越多,波形所含谐波的频率也越高。
举个例子
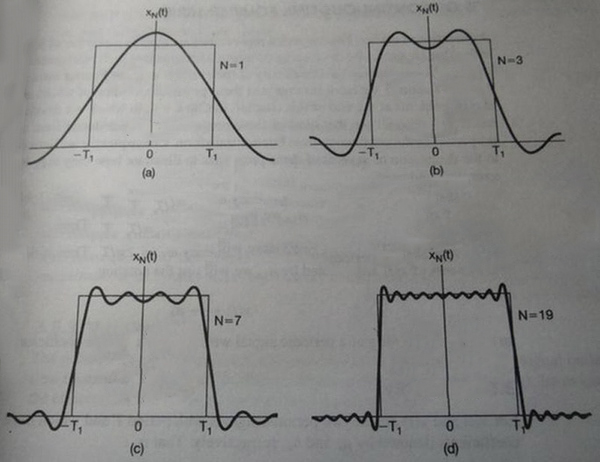
第一幅图是 1 个正弦波 cos(x)
第二幅图是 2 个正弦波的叠加 比如cos (x) +a.cos (3x+φ),有3个谐波分量
第三幅图是 4 个正弦波的叠加,有7个谐波分量
第四幅图是 10 个正弦波的叠加,有19个谐波分量
随着正弦波数量(谐波分量)逐渐的增长,他们最终会叠加成一个标准的方波
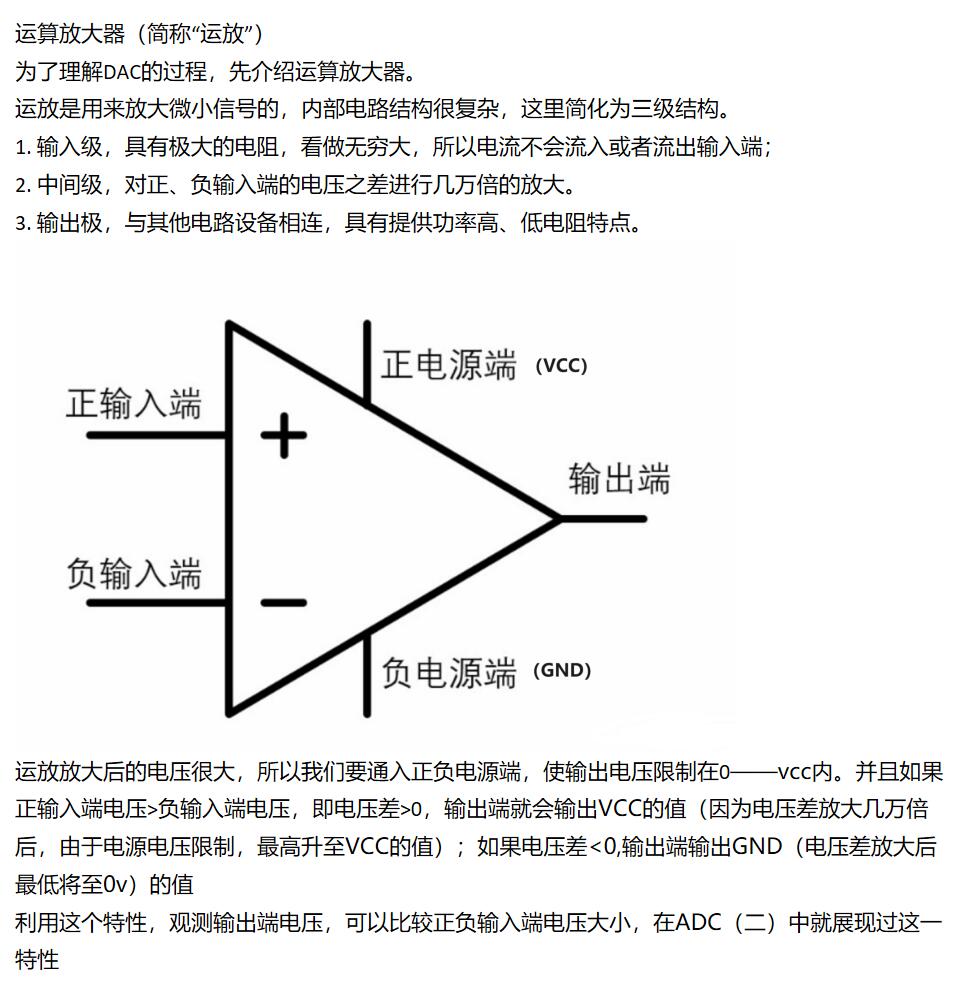
2023/10/28 运算放大器
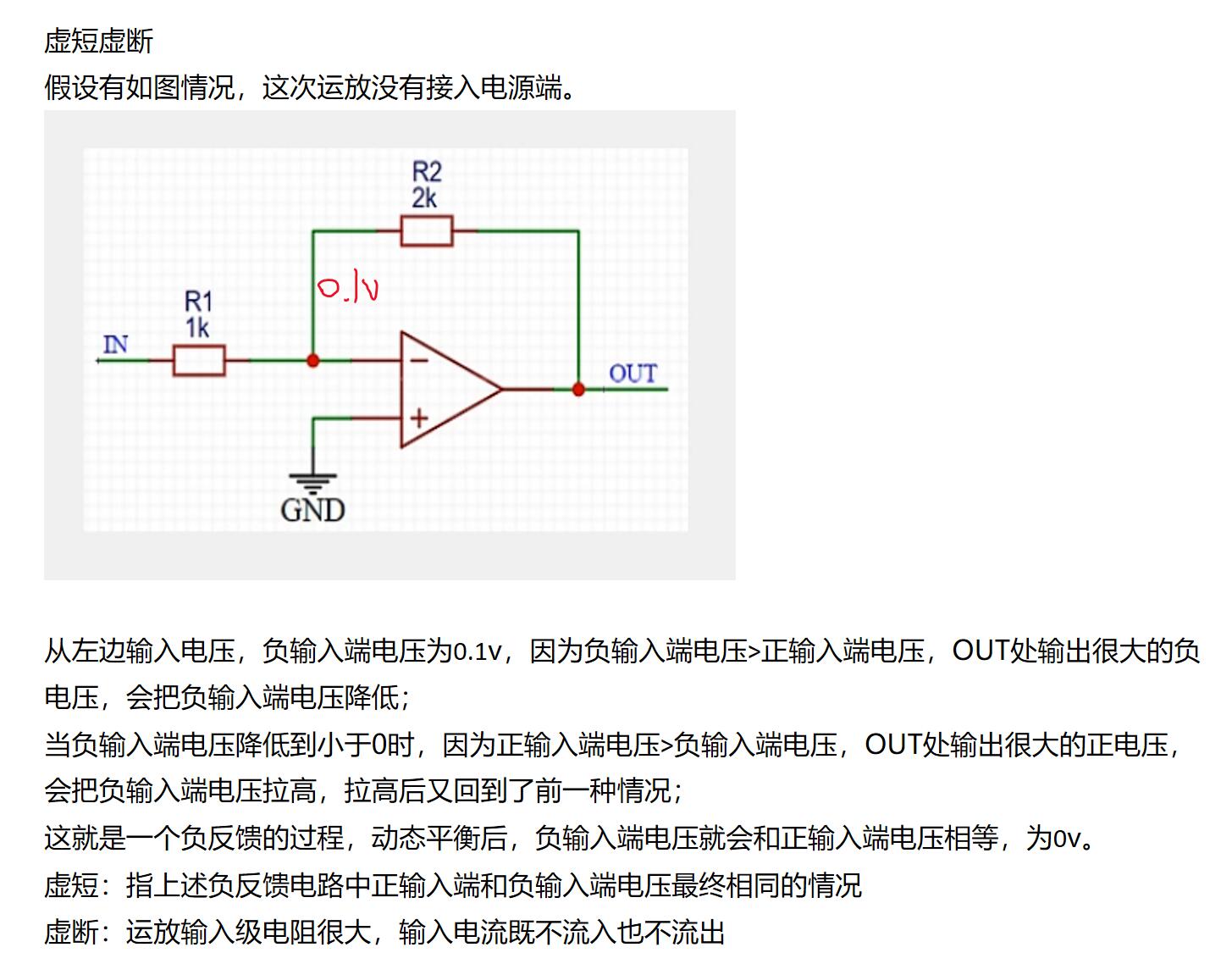
2023/10/29 虚短、虚断
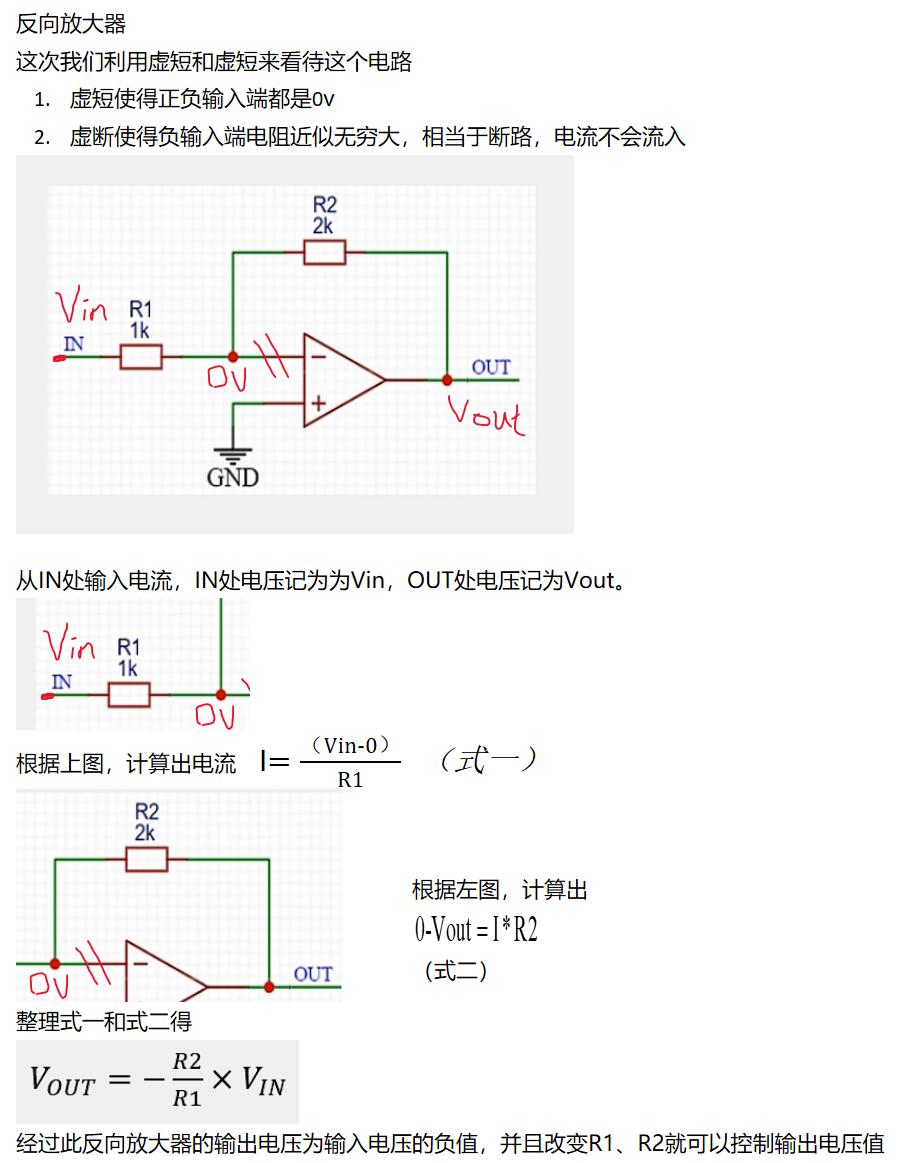
2023/10/30 反向放大器
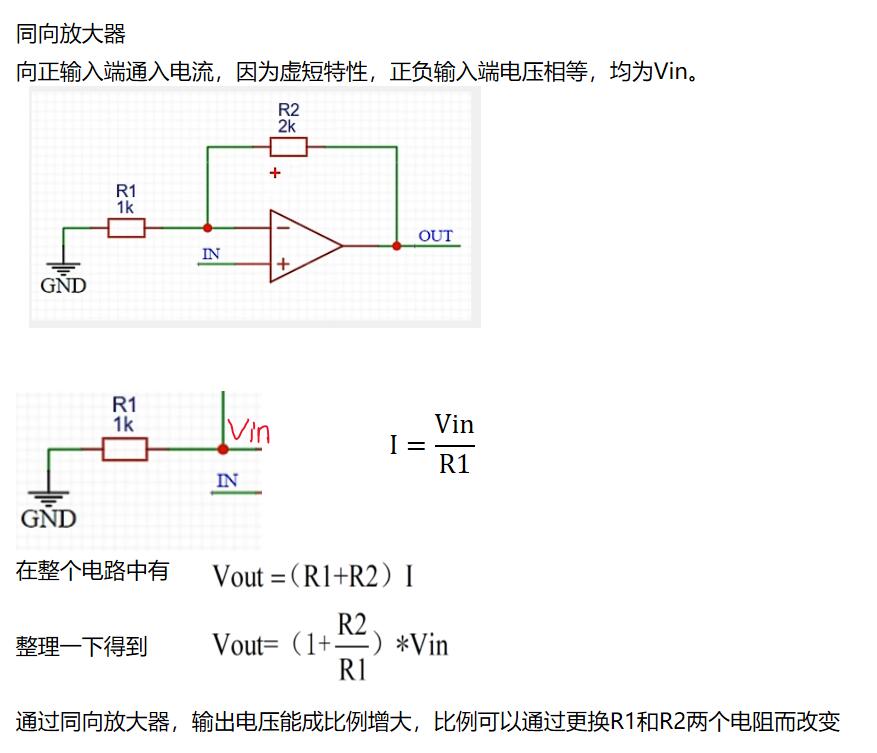
2023/10/31 同向放大器